2 Axis Gimbal Stand Menggunakan Arduino Dan Sensor MPU 6050 | proyek Arduino
Halo semua, kami kembali dengan postingan baru lainnya. Kami yakin Anda tahu apa itu gimbal. Nah, ini digunakan oleh juru kamera profesional untuk merekam bidikan sinematik atau video berkualitas tinggi. Nah pada artikel kali ini kita akan membuat stand gimbal dengan bantuan sensor giroskop MPU 6050 dan project Arduino UNO. Stand gimbal ini dapat berputar ke berbagai arah dan untuk gerakan ini, kami menggunakan dua motor servo. Karena kami menggunakan motor servo pada stand ini sehingga pergerakannya tidak semulus aslinya. Ada beberapa jenis motor BLDC khusus yang digunakan pada stand asli. Anda juga dapat membaca artikel tentang IoT dan Elektronik dasar. Jadi tanpa membuang waktu lagi mari kita mulai.
Keterangan
- Sensor giroskop digunakan untuk mendeteksi perubahan posisi suatu objek atau mesin.
- Dalam proyek kami, ini digunakan untuk menyeimbangkan sudut atas gimbal menggunakan motor servo.
- Saat kita menggerakkan atau memiringkan sensor, maka akan dihasilkan beberapa nilai sesuai dengan sudut pergerakannya.
- Jika Anda tidak terbiasa dengan antarmuka sensor giroskop MPU 6050 dengan Arduino, maka lakukan terlebih dahulu.
- Motor servo akan bergerak saat kita menggerakkan sensor ke kiri, kanan, depan, belakang.
- Anda dapat menggunakan potongan karton untuk memasang motor servo satu sama lain.
- Buat koneksi dengan benar seperti yang diberikan dalam diagram sirkuit dan kemudian unggah kodenya.
Komponen yang Diperlukan untuk gimble stand
- ArduinoUNO
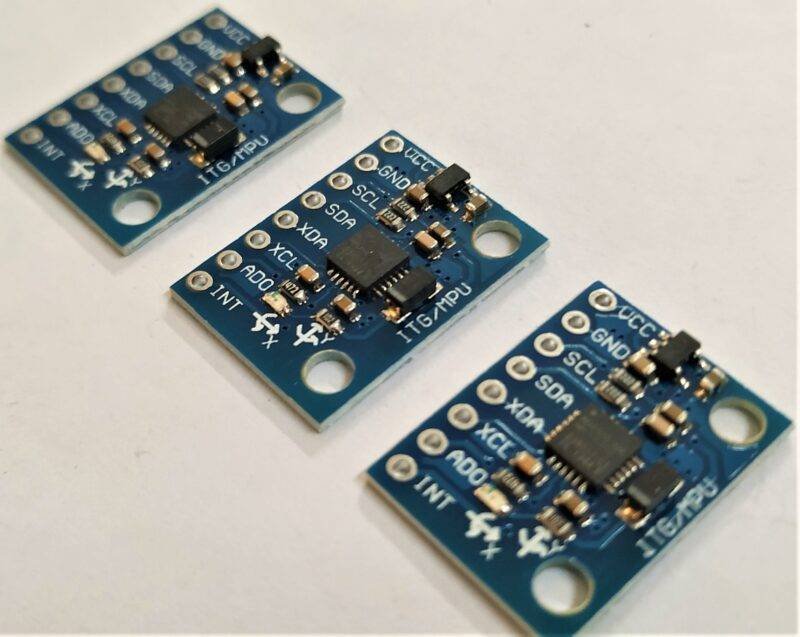
- Sensor giroskop MPU 6050
- Dua motor servo
- Kabel jumper dan papan tempat memotong roti
- Kabel USB untuk mengunggah kode
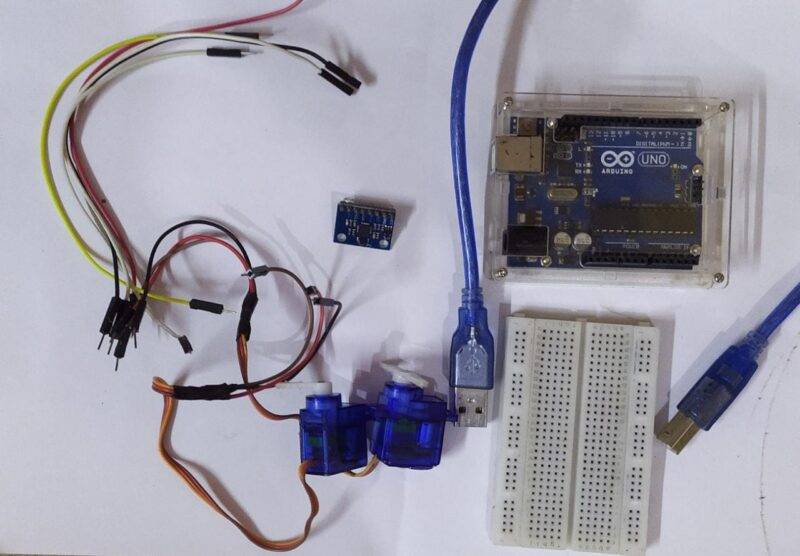
Diagram Sirkuit untuk Stand Gimbal
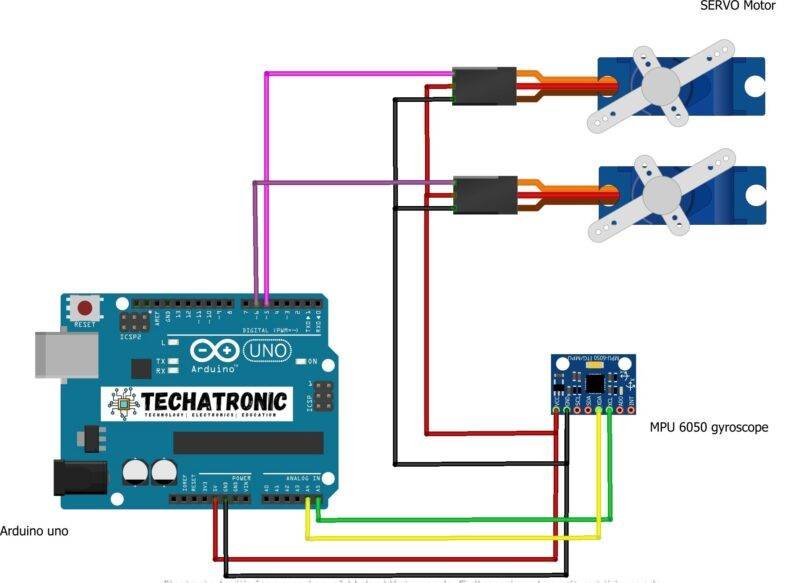
- Ambil dua motor servo dan sambungkan kabel suplai positifnya dengan pin 5 volt Arduino.
- Bergabunglah dengan kabel suplai negatif mereka dengan pin GND dari Arduino.
- Kemudian sambungkan pin VCC dan GND sensor giroskop MPU 6050 dengan pin 5 volt dan GND Arduino.
- Pasang pin SCL dan SDA dari sensor dengan pin SCL (Analog-5) dan SDA (Analog-4) dari Arduino.
- Bergabunglah dengan pin INT sensor dengan pin digital-2 Arduino.
- Terakhir, sambungkan kabel sinyal motor servo pertama dengan pin digital-6 Arduino dan kabel sinyal motor servo kedua dengan pin digital-5 Arduino. Sirkuit Anda sudah selesai sekarang.
Kode untuk proyek Gimbal Stand Arduino
CATATAN : Harap unggah kode ini ke Arduino UNO. Anda harus menginstal pustaka < MPU6050.h >, < Wire.h >, dan <Servo.h> terlebih dahulu. Periksa di sini cara menambahkan pustaka zip ke Arduino IDE.
// https://www.aditekjayaputra.com
#include <MPU6050.h>
#include <I2Cdev.h>
#include <Wire.h>
#include <Servo.h>
MPU6050 mpu;
int16_t ax, ay, az;
int16_t gx, gy, gz;
Servo servo1;
Servo servo2;
int val1;
int val2;
int pval1;
int pval2;
void setup() {
Wire.begin();
Serial.begin(115200);
mpu.initialize();
servo1.attach(5);
servo2.attach(6);
}
void loop() {
mpu.getMotion6(&ax,&ay, &az, &gx, &gy, &gz);
val1= map(ax, -17000, 17000, 0, 179);
if (val1 != pval1){
servo1.write(val1);
pval1= val1;
}
val2= map(ay, -17000, 17000, 0, 179);
if (val2 != pval2){
servo2.write(val2);
pval2= val2;
}
delay(5);
}
Kami harap Anda menyukai proyek ini dan memahaminya juga
0 Response to "2 Axis Gimbal Stand Menggunakan Arduino Dan Sensor MPU 6050 | proyek Arduino"
Post a Comment